lab7 信号量与同步 信号量结构初始化 新建 lab7/src/include/prt_sem_external.h 头文件
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 #ifndef PRT_SEM_EXTERNAL_H #define PRT_SEM_EXTERNAL_H #include "prt_sem.h" #include "prt_task_external.h" #if defined(OS_OPTION_POSIX) #include "bits/semaphore_types.h" #endif #define OS_SEM_UNUSED 0 #define OS_SEM_USED 1 #define SEM_PROTOCOL_PRIO_INHERIT 1 #define SEM_TYPE_BIT_WIDTH 0x4U #define SEM_PROTOCOL_BIT_WIDTH 0x8U #define OS_SEM_WITH_LOCK_FLAG 1 #define OS_SEM_WITHOUT_LOCK_FLAG 0 #define MAX_POSIX_SEMAPHORE_NAME_LEN 31 #define GET_SEM_LIST(ptr) LIST_COMPONENT(ptr, struct TagSemCb, semList) #define GET_SEM(semid) (((struct TagSemCb *)g_allSem) + (semid)) #define GET_SEM_TSK(semid) (((SEM_TSK_S *)g_semTsk) + (semid)) #define GET_TSK_SEM(tskid) (((TSK_SEM_S *)g_tskSem) + (tskid)) #define GET_SEM_TYPE(semType) (U32)((semType) & ((1U << SEM_TYPE_BIT_WIDTH) - 1)) #define GET_MUTEX_TYPE(semType) (U32)(((semType) >> SEM_TYPE_BIT_WIDTH) & ((1U << SEM_TYPE_BIT_WIDTH) - 1)) #define GET_SEM_PROTOCOL(semType) (U32)((semType) >> SEM_PROTOCOL_BIT_WIDTH)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 struct TagSemCb {#if defined(OS_OPTION_SEM_RECUR_PV) #endif struct TagListObject semList;struct TagListObject semBList;enum SemMode semMode;#if defined(OS_OPTION_POSIX) char name[MAX_POSIX_SEMAPHORE_NAME_LEN + 1 ]; sem_t handle;#endif
[!NOTE]
关键字段 :
semCount:信号量的计数值(例如,二进制信号量为0或1)。semList:阻塞在该信号量上的任务链表(当信号量不可用时挂起任务)。semOwner:记录当前持有信号量的任务(用于互斥锁)。semType:通过位掩码存储信号量类型和协议。
1 2 3 4 5 6 7 8 9 10 11 12 extern U16 g_maxSem; extern struct TagSemCb *g_allSem; extern U32 OsSemCreate (U32 count, U32 semType, enum SemMode semMode, SemHandle *semHandle, U32 cookie) extern bool OsSemBusy (SemHandle semHandle) #endif
[!NOTE]
OsSemCreate :创建信号量。
参数:初始计数值(count)、信号量类型(semType)、模式(semMode)、返回句柄(semHandle)、可选参数(cookie)。
OsSemBusy :检查信号量是否被占用(例如,互斥锁是否已被任务持有)。
新建 src/kernel/sem/prt_sem_init.c 文件。
1 2 3 4 5 6 7 8 9 #include "prt_sem_external.h" #include "os_attr_armv8_external.h" #include "os_cpu_armv8_external.h" struct TagListObject g_unusedSemList;struct TagSemCb *g_allSem;extern void *OsMemAllocAlign (U32 mid, U8 ptNo, U32 size, U8 alignPow)
信号量初始化函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 OS_SEC_L4_TEXT U32 OsSemInit (void ) struct TagSemCb *semNode = NULL ;struct TagSemCb *)OsMemAllocAlign ((U32)OS_MID_SEM,0 ,4096 ,if (g_allSem == NULL ) {return OS_ERRNO_SEM_NO_MEMORY;4096 / sizeof (struct TagSemCb);char *cg_allSem = (char *)g_allSem;for (int i = 0 ; i < 4096 ; i++)0 ;INIT_LIST_OBJECT (&g_unusedSemList);for (idx = 0 ; idx < g_maxSem; idx++) {struct TagSemCb *)g_allSem) + idx; ListTailAdd (&semNode->semList, &g_unusedSemList);return ret;
信号量创建函数
[!NOTE] 参数
count:信号量初始计数值(如二进制信号量为0或1)。semType:信号量类型(如SEM_TYPE_COUNT计数型、SEM_TYPE_BIN二进制型)。semMode:阻塞任务唤醒模式(如SEM_MODE_FIFO先进先出)。semHandle:输出参数,返回创建的信号量句柄。cookie:预留参数(未使用)。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 OS_SEC_L4_TEXT U32 OsSemCreate(U32 count, U32 semType, enum SemMode semMode,if (semHandle == NULL) {if (ListEmpty(&g_unusedSemList)) {semCreated ->semCreated ->semCreated ->semCreated ->semCreated ->if (GET_SEM_TYPE(semType) == SEM_TYPE_BIN) {semCreated ->if defined(OS_OPTION_SEM_RECUR_PV)if (GET_MUTEX_TYPE(semType) == PTHREAD_MUTEX_RECURSIVE) {semCreated ->0 ;semCreated ->semHandle = (SemHandle)semCreated->
[!NOTE] 递归互斥锁递归互斥锁 (Recursive Mutex)是一种特殊的互斥锁(Mutex),允许 同一个线程 多次获取(Lock)同一个锁而不会导致死锁。普通互斥锁如果被同一个线程重复加锁,会导致线程阻塞(死锁),但递归互斥锁会记录加锁次数,必须解锁(Unlock)相同次数才能真正释放锁
在 src/bsp/os_cpu_armv8_external.h 加入 定义
1 #define OS_SEM_ADDR_ALLOC_ALIGN 2U
新建 src/kernel/sem/prt_sem.c 文件。
1 2 3 4 5 6 7 #include "prt_sem_external.h" #include "prt_asm_cpu_external.h" #include "os_attr_armv8_external.h" #include "os_cpu_armv8_external.h"
OsSemPostErrorCheck(释放信号量前检查)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 OS_SEC_ALW_INLINE INLINE U32 OsSemPostErrorCheck (struct TagSemCb *semPosted, SemHandle semHandle) void )semHandle;if (semPosted->semStat == OS_SEM_UNUSED) {return OS_ERRNO_SEM_INVALID;if ((semPosted)->semCount >= OS_SEM_COUNT_MAX) {return OS_ERRNO_SEM_OVERFLOW;return OS_OK;
OsSemPendListPut(挂载阻塞任务到信号量链表)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 OS_SEC_L0_TEXT void OsSemPendListPut(struct TagSemCb *semPended, U32 timeOut)struct TagListObject *pendObj = &runTsk->runTsk ->if (semPended->curTskCb , &semPended->if (curTskCb->priority > runTsk->istTailAdd (pendObj, &curTskCb->istTailAdd (pendObj, &semPended->
OsSemPendListGet(从信号量链表唤醒任务)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 OS_SEC_L0_TEXT struct TagTskCb *OsSemPendListGet (struct TagSemCb *semPended)struct TagTskCb *taskCb = GET_TCB_PEND (LIST_FIRST (&(semPended-> semList)));ListDelete (LIST_FIRST (&(semPended-> semList)));if (TSK_STATUS_TST (taskCb, OS_TSK_TIMEOUT)) {OS_TSK_DELAY_LOCKED_DETACH (taskCb);TSK_STATUS_CLEAR (taskCb, OS_TSK_TIMEOUT | OS_TSK_PEND);-> taskSem = NULL;if (!TSK_STATUS_TST (taskCb, OS_TSK_SUSPEND)) {OsTskReadyAddBgd (taskCb);return taskCb;
OsSemPendParaCheck(Pend操作参数检查)
1 2 3 4 5 6 7 8 9 10 11 12 if (timeout == 0 ) {return OS_ERRNO_SEM_UNAVAILABLE;if (OS_TASK_LOCK_DATA != 0 ) {return OS_ERRNO_SEM_PEND_IN_LOCK;return OS_OK;
OsSemPendNotNeedSche(快速路径检查)
1 2 3 4 5 6 7 8 9 10 11 bool OsSemPendNotNeedSche (struct TagSemCb *semPended, struct TagTskCb *runTsk)if (semPended-> semCount > 0 ) {-> semCount--;-> semOwner = runTsk-> taskPid;return TRUE;return FALSE;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 uint ptr_t int Save;if (semHandle >= (SemHandle)g_maxSem) {return OS_ERRNO_SEM_INVALID;int Save = OsIntLock();if (semPended->semStat == OS_SEM_UNUSED) {int Save);return OS_ERRNO_SEM_INVALID;if (OS_INT_ACTIVE) {int Save);return OS_ERRNO_SEM_PEND_INTERR;if (OsSemPendNotNeedSche(semPended, runTsk) == TRUE) {int Save);return OS_OK;if (ret != OS_OK) {int Save);return ret;if (timeout != OS_WAIT_FOREVER) {int Save);return OS_ERRNO_SEM_FUNC_NOT_SUPPORT;else {int Save);int Save);return OS_OK;
OsSemPostSchePre(Post操作预处理)
1 2 3 4 5 6 7 8 OS_SEC_ALW_INLINE INLINE void OsSemPostSchePre (struct TagSemCb *semPosted) struct TagTskCb *resumedTask = NULL ;OsSemPendListGet (semPosted);
OsSemPostIsInvalid(Post操作无效检查)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 bool OsSemPostIsInvalid(struct TagSemCb *semPosted)if (GET_SEM_TYPE(semPosted->semType) == SEM_TYPE_BIN) {if ((semPosted)->semCount == OS_SEM_FULL) {return TRUE ;return FALSE ;
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 uint ptr_t int Save;if (semHandle >= (SemHandle)g_maxSem) {return OS_ERRNO_SEM_INVALID;int Save = OsIntLock();if (ret != OS_OK) {int Save);return ret;if (OsSemPostIsInvalid(semPosted) == TRUE) {int Save);return OS_OK;if (!ListEmpty(&semPosted->semList)) {int Save);else {int Save);return OS_OK;
[!NOTE] 关键函数及其操作(1) OsSemPendListPut(挂载阻塞任务) void OsSemPendListPut(struct TagSemCb *semPended, U32 timeOut);RUNNING_TASK)挂到信号量的阻塞队列(semList)。semMode 决定插入顺序:SEM_MODE_PRIOR:按任务优先级插入(高优先级在前)。SEM_MODE_FIFO:插入队尾。
关键操作 :
从就绪队列移除任务(OsTskReadyDel)。
设置任务状态为 OS_TSK_PEND(阻塞态)。(2) OsSemPendListGet(唤醒阻塞任务) struct TagTskCb *OsSemPendListGet(struct TagSemCb *semPended);
功能 :
从 semList 取出第一个任务,加入就绪队列(OsTskReadyAddBgd)。
清除任务的阻塞状态(OS_TSK_PEND)。
返回被唤醒的任务指针。(3) OsSemPostErrorCheck(释放前检查) U32 OsSemPostErrorCheck(struct TagSemCb *semPosted, SemHandle semHandle);
检查项 :
信号量是否未初始化(semStat == OS_SEM_UNUSED)。
计数型信号量是否溢出(semCount >= OS_SEM_COUNT_MAX)。
src/include/prt_task_external.h 加入 OsTskReadyAddBgd()
1 2 3 4 OS_SEC_ALW_INLINE INLINE void OsTskReadyAddBgd (struct TagTskCb *task)OsTskReadyAdd (task);
src/kernel/task/prt_task.c 加入 OsTskScheduleFastPs()
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 void OsTskScheduleFastPs(uint ptr_t int Save)if ((g_highestTask != RUNNING_TASK) && (g_uniTaskLock == )) {if (OS_INT_INACTIVE) {int Save);
src/bsp/os_cpu_armv8_external.h 加入 OsTaskTrapFastPs()
1 2 3 4 5 OS_SEC_ALW_INLINE INLINE void OsTaskTrapFastPs (uintptr_t intSave)OsTaskTrap ();
加入 src/include/prt_sem.h [下载 ],该头文件主要是信号量相关的函数声明和宏定义。
验证
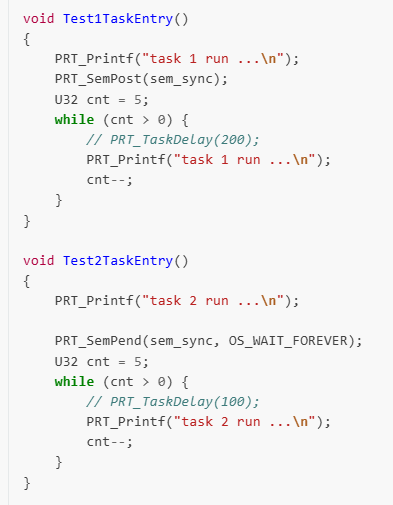
Test1Task :
打印消息后释放信号量 (PRT_SemPost)。
循环打印 5 次 task 1 run ...。
Test2Task :
尝试获取信号量 (PRT_SemPend),因初始值为 0 而阻塞。
被 Test1Task 唤醒后,循环打印 5 次 task 2 run ...。
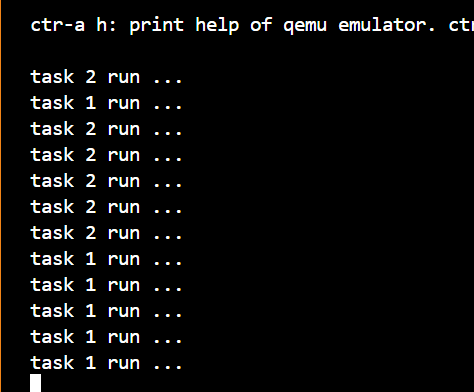
高优先级任务 (Test2Task) 优先执行,但通过信号量实现可控阻塞。
task2的优先级>task1的优先级,task2先执行,但是我们对信号量初始为0,task2执行p操作,信号量-1,此时信号量<0,task2被阻塞,task1开始运行,调用v操作,信号量+1,此时信号量=0,唤醒信号量阻塞队列的第一个任务task2,执行task2后在执行task1,所以输出
作业
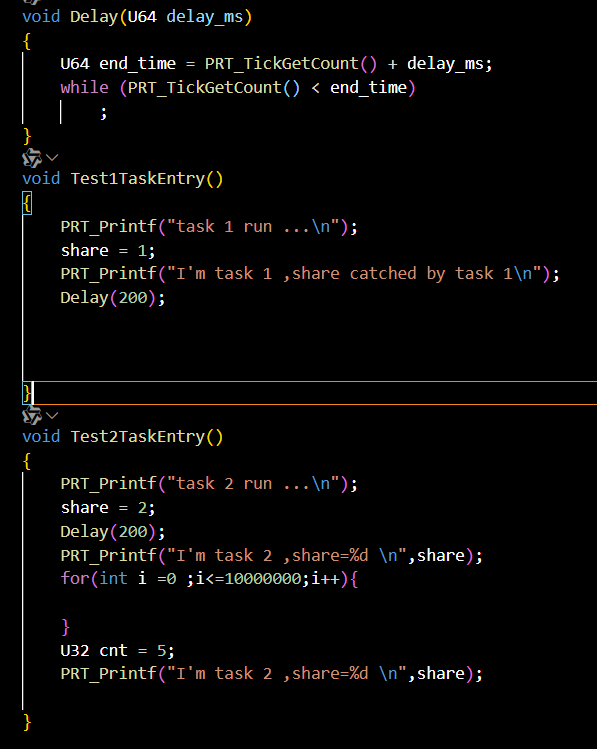
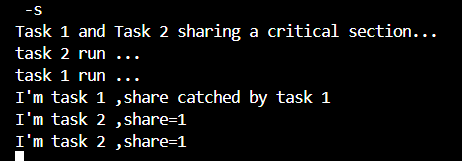
违反原子性缺陷
违反顺序缺陷 两个内存访问的预期顺序被打破
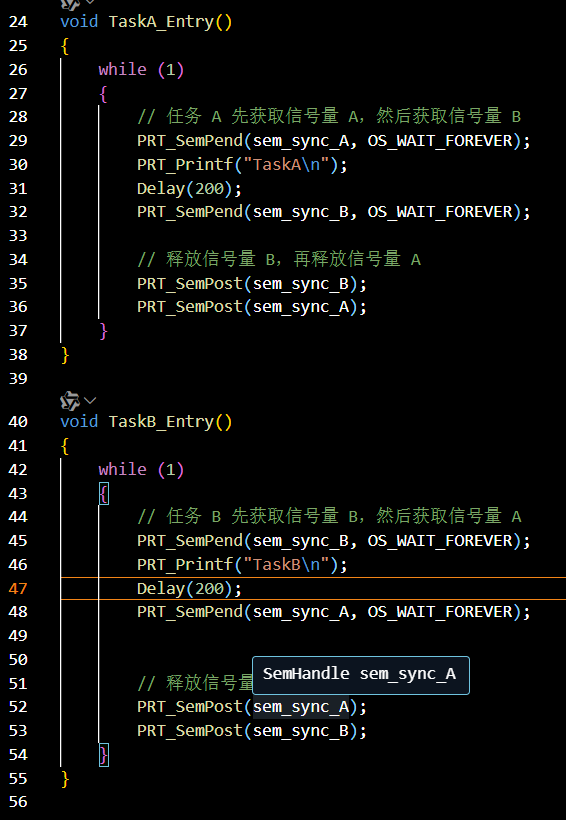
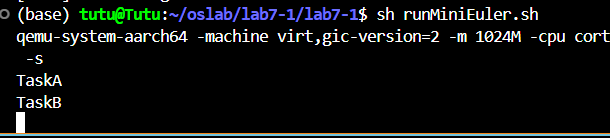
死锁 两个进程相互等待
可以看到taskA获取信号量A后等待,此时中断,B获取信号B后等待,两个进程接下来都各自希望获取对方的信号量,陷入了死锁